








摘要
尽管有大量的努力致力于理解动物群体集体运动的潜在复杂性和出现,但不同的外部环境对这种运动的作用在很大程度上仍未被探索。在这里,通过结合时间序列分析和复杂的网络工具,我们提出了荫凉环境对鱼类(鲢鱼)行为的影响的广泛调查Hypophthalmichthys molitrix)。我们发现,在白天,树荫有利于鱼类的栖息,但对树荫的偏好程度在不同的试验和池塘中有很大的差异。在白天和夜间,鲢鱼在树荫下的速度要慢得多,速度的持久性也要低得多,在夜间,鲢鱼表现出最高的坚持度和速度。此外,我们的研究表明,遮荫通过减少鱼的极化、个体之间的互动次数和周围邻居之间的稳定性来影响鱼的群集行为;然而,与夜间相比,鱼在树荫下保持更高的局部秩序。
简介
集体运动是许多动物物种聚集成羊群、牛群或学校的一种常见行为1,2.这些集体运动产生了无数的时空模式,众所周知,这些模式在自然界中提供了惊人的视觉奇观3..除了沉思的美,理解动物群体集体运动的潜在复杂性和出现长期以来一直是多个学科研究人员议程的一部分。在提出和研究最小模型(如Vicsek模型)方面已经投入了大量的精力4)能够将个人层面的规则与观察到的宏观现象联系起来5,6,7,8,9.然而,建模方法的进步在很大程度上与经验观察不耦合,这反过来又造成了理论和实验之间的差距,而这种差距直到最近才开始缩小。事实上,最近依靠新方法和工具来跟踪动物群体的研究已经阐明了几年前被认为是不可行的实证问题10,11,12,13,14,15.例如,在移动群体中识别有影响的鱼类邻居16,捕食对鱼群相互作用的影响17以及鸽子的集体逃跑18,出现旋涡运动19,以及社会互动对蜜蜂发展轨迹的作用20..
尽管已经进行了令人着迷的研究,但大多数研究都集中在单一的外部环境上,人们对不同的外部环境对动物集体行为的影响知之甚少21.在这种情况下,一种令人兴奋的可能性是指选择头顶结构,在鱼类的非阴影区域创建阴影(以下为阴影结构)。一些物种表现出对荫凉结构的亲和性,这也可能在入侵物种的扩散和建立中发挥作用22.事实上,有经验证据表明,荫凉增加了某些鱼类的停留时间。例如,蓝鳃鱼(Lepomis macrochirus),一种原产于美国的淡水鱼,据说它会在岸边的树荫下躲避,即使有捕食者存在,它也确实表现出对阴影区域的强烈偏好23.众所周知,树荫结构也会吸引海洋鱼类到红树林栖息地24,增加鲑鱼的数量(雄鱼kisutch)在溪流河道25并增加三刺鱼(Gasterosteus aculeatus)26和白鱼湖(Coregonus clupeaformis)27.对阴凉处的偏好通常与低捕食风险有关,不仅对鱼类如此23,25在鸟类中也是如此28和啮齿动物29,30..另外,有些品种,例如斑马鱼(鲐鱼类)26它们对阴影没有明显的偏好,而其他鱼类,如支奴干鲑鱼(雄鱼tshawytscha)似乎认为荫凉处是危险的环境31.
考虑到有兴趣了解一些物种对荫凉的偏好,以及缺乏研究不同环境下集体行为的工作,在这里我们研究了荫凉如何影响鲢鱼集体行为的各个方面(Hypophthalmichthys molitrix).鲢鱼原产于东亚,在20世纪70年代被引入北美用于水产养殖,但很快就逃了出来。这种入侵物种现在在密西西比河流域非常丰富,并进一步扩展到北美其他流域,对本地鱼类种群产生影响32.最近的研究发现,鲢鱼会在密西西比河上的一个大水闸和大坝附近度过33在白天,建议阴凉处可以鼓励使用。此外,鲢鱼的群体倾向可能与捕食者回避有关,但目前尚不清楚34.了解鲢鱼的行为及其在不同外部环境下的变化可能揭示栖息地利用的重要模式,并对物种管理产生潜在影响。因此,我们工作的主要目标是了解在不同的外部环境下,这些鱼的集体行为是如何变化的,这些外部环境与遮阳结构的存在有关,在白天(在荫蔽处和不在荫蔽处)和晚上。
为此,我们在四个土塘中进行了大规模实验,其中小学校的位置(\ \ (sim \)在7个48小时的试验中,使用声学遥测阵列跟踪10个鲢鱼。在这些实验中,通过在每个池塘中锚定一个大型漂浮平台来创建一个阴影环境,使我们能够量化阴影的选择,更重要的是,这些鱼在白天和晚上在阴影结构下或离开阴影结构时的行为有何不同。鲢鱼在白天表现出对荫凉结构的偏好,但这种偏好的强度在不同的试验和池塘中有所不同。我们的研究表明,鲢鱼在阴凉处比在阴凉处游得慢;然而,这些鱼在晚上达到它们的最高速度。当鲢鱼在树荫下时,运动的持久性也会降低,而在夜间则会增加。此外,阴影通过减少它们的两极分化、个体之间的互动数量和当地邻居的稳定性来影响这些鱼的群集行为。尽管如此,我们发现鲢鱼在树荫下保持了一种中等程度的局部秩序,即使是在群集状态下,它们也会跟踪邻居的位置。
在接下来的内容中,我们将描述实验,鱼类轨迹的收集,以及对该物种阴影区域偏好的分析。接下来,我们量化阴影对鱼的速度和速度时间序列的持续程度的影响。然后,针对鲢鱼群体的集体行为,我们估计了与鱼群对齐和旋转程度相关的两个顺序参数。最后,我们根据鱼的空间关系创建了一个复杂的网络表示,以突出阴影如何影响鲢鱼之间的关系。
结果
为了研究荫蔽对鲢鱼行为的影响,我们使用了在四个土池塘中进行的实验结果,这些池塘的水面尺寸约为40米乘25米,深度为1至2米(见“材料与方法”)。这些实验包括在每个池塘中进行七次试验,使用声学遥测阵列记录鱼的位置,为期两天。一个5米2在每次试验中,浮动平台被固定在每个池塘的五个位置之一,在白天创造一个阴影环境。实验开始时,每个池塘中有10个个体,但由于发射机的损耗,这个数字在试验中减少了(参见“材料与方法和Table1).
数字1A、B为白天和夜间不同池塘和试验中两条鱼位置的密度图(见图1)。S1所有池塘和试验)。我们观察到,其中一条鱼在白天对池塘的其他地方表现出强烈的偏好,而另一条鱼似乎没有同样的偏好。当我们考虑所有鱼类的位置,并通过计算它们在阴影结构下花费的时间在一天中几个小时的比例来评估阴影选择时,也会出现类似的变化。无花果。1C,D展示了对来自同一池塘的所有鱼的分析,以及用于创建密度图的试验。我们注意到图中鱼的个体行为。1A,B同意他们学校在荫凉结构下花费的时间的分数。池塘里的鱼和无花果的试验。1C白天大部分时间都在树荫下,而晚上则忽略了树荫结构。相反,图中所示的池塘和试验中的鱼。1D从不选择在午夜到中午之间的荫凉结构,并且在下午和傍晚早些时候很少在荫凉下。这两个池塘和试验确实是阴影偏好可变性的极端例子(见图。S2所有池塘和试验)。我们使用逻辑回归量化了白天对荫凉结构的偏好,其中一个二元变量表明是白天还是夜晚被用来预测鱼是否在荫凉下(见“材料与方法”)。我们发现,这些协变量之间的关联在不同的池塘和试验中有很大的不同,但在所有情况下,日光显著增加了在荫凉结构下发现鱼的概率(图2)。1E).为了解释每个池塘中潜在的位置偏差,我们进行了类似对照的分析,其中给定试验和池塘中的阴影偏好是使用下一次和以前试验的阴影位置来估计的(即,不是实际的阴影位置)。我们发现,在两个类似对照的分析中,白天在阴凉处发现鱼的概率增量消失了。S3),表明鱼类选择荫蔽与否与昼夜二元自变量之间的关系不能用池塘本身可能产生的偏向性偏好来解释。此外,在池塘和试验中,没有可识别的遮荫选择模式(图。S1和S2),在整个试验过程中,我们发现一天中在阴凉处停留的时间百分比与温度或光照强度之间没有相关性(图。S4,S5,S6).

在白天,鲢鱼喜欢在阴凉的地方。(一个,B)来自两个不同试验和池塘的两个鱼类位置的密度图。橙色表示在白天记录的位置,而紫色表示在晚上收集的位置。灰色实线代表池塘的界限,粗大的绿色方块表示在面板左上方所示的特定试验和池塘中遮阳结构的实际位置。小写字母(从' a '到' e ')表示所有可能的阴影位置。我们观察到鱼在(一个)在白天对阴影区域有极大的偏好,而在(B).(C,D)遮荫选择的差异是一天中不同时间的函数。圆形显示了在两个试验和池塘的1小时时间窗口内,在荫蔽结构下记录的所有鱼类位置的百分比。虚线表示鱼在池塘上随机移动时阴影下位置的预期比例,背景颜色表示白天(橙色)和夜间(紫色)。在试验1的两个观察日里,2号池塘里的鱼在白天几乎所有时间都在阴凉处,晚上则避免在阴凉处。在试验6中,4号池塘中的鱼很少在白天(特别是在早上)选择遮阳结构。(E)在白天时间内在荫蔽结构下找到位置的概率增量,通过每个试验和池塘的逻辑回归估计。鱼选择荫蔽与否与昼夜二元自变量之间的关系变化很大,但对所有试验和池塘都具有显著意义(p值\ (< 0.001 \)).
虽然有证据支持荫凉结构鼓励鲢鱼居住的假设,但我们不知道这些鱼在选择荫凉结构时的行为与在白天或夜间离开荫凉时是否有本质上的差异。为了解决这个问题,我们计算了鱼的速度,将数据分为三类(见“材料与方法):白天在阴凉处钓鱼,白天在阴凉处钓鱼,晚上在阴凉处钓鱼。我们没有按位置对夜间位置进行分类,因为在夜间与遮阳结构的相互作用最小。数字2A描述了鱼速度的互补累积分布(即概率)p(v),发现速度大于的鱼v)分为这三类。这些结果清楚地表明,鱼在白天在荫凉结构下移动得慢得多,平均而言\(v \rangle \约0.13\)M /s,鱼很少超过1 M /s。平均而言,鱼的速度几乎是我们的两倍(\(v \rangle \约0.23\)M /s)在白天离开阴凉处时。鱼在夜间活动稍慢(\(v \rangle \约0.21\)M /s)比白天离开阴凉处的速度快,但它们在夜间达到了我们试验中记录的最高速度。这些速度上的差异表明鱼类可能会利用这些结构来休息和庇护。相反,在树荫下更快的速度可能与觅食和进食行为有关,因为鲢鱼是远洋滤食性动物35,36,37.夜间的高速也表明,这些鱼利用黑暗的掩护安全地探索池塘,因为这种视觉条件可能会降低现实环境中的捕食风险。

鱼的速度在白天进出遮阳建筑和夜间有所不同。(一个)鱼速的互补累积分布v分为三类:阴凉处的白天时间(绿色方格),阴凉处外的白天时间(粉色圆圈),以及夜间位置(紫色叉号)。鱼在阴凉处移动较慢(\(v \rangle = 0.1286 \pm 0.0001\)米/秒;除另有说明外,平均数±平均数的标准误差)比p价值\ (< 0.001 \),排列检验)。鱼在白天离开阴凉处时,平均速度较高(\(v \rangle = 0.2324 \pm 0.0001\)M /s)比夜间(\(v \rangle = 0.2086 \pm 0.0001\)米/秒;p价值\ (< 0.001 \),排列检验)。然而,速度分布在夜间更偏\(4.1 \pm 0.3\)vs。\(1.8 \pm 0.1\)(在阴凉处)和\(1.7 \pm 0.1\)(走出阴凉处);p值\ (< 0.001 \)排列测试],表明鱼在夜间达到最高速度。(B赫斯特指数的概率分布h通过核密度估计从速度时间序列中获得,分为与前一个面板相同的三类。速度时间序列在三个类别中表现出长时间的持续行为,但在白天遮荫时,平均赫斯特指数略小(\(\langle h \rangle = 0.639 \pm 0.002\))比白天离开阴凉处时(\(\langle h \rangle = 0.661 \pm 0.002\);p价值\ (< 0.001 \),排列测验)或在夜间(\(\langle h \rangle = 0.689 \pm 0.002\);p价值\ (< 0.001 \),排列检验)。
除了速度概率分布外,鱼的速度时间序列的动态特征还可以反映出白天或夜间在荫蔽下或不在荫蔽下的不同行为。一个有趣的可能性是量化鱼的速度的持续程度。如果鱼在树荫下游移,并且更客观地离开树荫,我们预计白天鱼在树荫下时速度时间序列的持久性较低。为了验证这个假设,我们估计了赫斯特指数h从速度时间序列(见“材料与方法),归入上述相同的类别。赫斯特指数\ \ (h > 0.5)指示长期持续的行为,这样时间序列增量之后更有可能是具有相同信号的增量,而且越接近h越到1,持久度越高。的值\ (h < 0.5 \)表示一种反持久行为,其中时间序列增加交替符号的可能性大于偶然性。时间序列不相关,如果\ (h = 0.5 \).数字2B显示,鱼的速度以白天和夜间在阴影下或不在阴影下的长期持久性为标志(大约90%的时间序列具有这种特征)\ \ (h > 0.5)).尽管如此,在分布上仍有明显的差异h在这三种情况中。我们观察到白天阴凉位置的赫斯特指数分布与其他两种情况相比略有左移,这反过来使的平均值h在阴凉处(\(\langle h \rangle = 0.639 \pm 0.002\);除另有说明外,平均值±平均值的标准误差)小于白天背阴处(\(\langle h \rangle = 0.661 \pm 0.002\))和晚上(\(\langle h \rangle = 0.689 \pm 0.002\)).这些结果支持了鱼类在阴凉处活动不那么持久的假设,也表明它们的活动在夜间更持久。
另一个有趣的问题是,阴暗的环境是否会影响鲢鱼的集体行为。为了研究这种可能性,我们计算了两个顺序参数,量化了鱼群的对齐程度和旋转程度38,39.定义为"材料与方法,这些是极化顺序参数\ (O_p \)旋转顺序参数\ (O_r \).的价值\ (O_p \)范围从0到1,测量鱼类的集体运动是如何对齐的:\ (O_p \约0 \)表示鱼类在不同方向无序移动的群集状态,而\ (O_p \大约1 \)表示一种类极化状态,在这种状态下,鱼彼此对齐移动。的价值\ (O_r \)也被限制在0和1之间,这个顺序参数描述了学校围绕其质心的旋转程度:\ (O_r \约0 \)表示没有旋转的状态\ (O_r \大约1 \)表示强力旋转或铣削状态。我们计算的值\ (O_p \)和\ (O_r \)在所有有五条或五条以上鱼的池塘和试验中,对每个瞬间的时间,并将这些值分组到前面分析中使用的相同的三个类别中(白天在荫蔽下或不在荫蔽下的位置,以及夜间的位置)。数字3.A-C描述了每个类别的两个阶参数的联合概率分布,而图。3.D,E分别表示旋转和极化阶参数的相应边际分布。

阴影影响鲢鱼的群体行为。旋转的联合概率分布(\ (O_r \))和极化(\ (O_p \))将鱼类位置分为三类时的排序参数:(一个)阴凉处的白天时间,(B)白天离开阴凉处的时间,以及(C)夜间睡姿。的边际分布(D)旋转和(E)通过核密度估计得到相同三类的极化序参数。除了稍微局部化的分布\ (O_r \)在白天遮阳时段,三者的集体旋转程度无明显差异。相反,用\ (O_p \)当鱼在白天离开阴凉处时,比其他两种情况更严重。
的联合概率分布\ (O_p \)与\ (O_r \)显示这些鱼类的排列程度在三个类别中是不同的,鱼群表现出更高的排列程度\ (O_p \)在白天离开阴凉处时的值(图。3.B)与其他两类相比。当注意到的边际分布时,这些明显的行为变得更加明显\ (O_p \)在白天没有阴影的位置有接近1的峰值(图。3.E).当鱼在荫蔽结构外时,该顺序参数的平均值较高(\(\langle O_p\rangle \约0.59\))比在白天在阴凉处(\(\角度O_p\范围\约0.50\))和晚上(\(\角度O_p \范围\约0.50\));此外,发现处于强对齐状态的个体的概率(\ \ (O_p > 0.9)),在荫蔽结构以外的环境中,是其他两类环境的两倍。因此,这些结果表明,鱼类在白天离开阴凉处时,可能采用高度极化的状态作为躲避可能的捕食者的策略。有趣的是,在白天,在阴影下的极化程度(图。3.A)与夜间观测到的相似(图。3.C).因此,即使鱼在夜间比白天在阴凉处游得更快更持久,但群体成员之间的对齐程度很低,在这两种情况下没有太大差异。夜间和白天树荫下的低极化状态可能代表了夜间和白天树荫下捕食压力降低或降低的行为反应。
相反,顺序参数的联合概率分布如图。3.这三个类别之间的旋转程度没有太大差异。的边际分布\ (O_r \)(无花果。3.D)表明白天遮阳时的旋转程度仅略小,但该顺序参数的平均值大致相同(\(\lang O_r\rangle \约0.61\))。在我们的实验中,鱼类很少采用强旋转群态,这样只有\盅(\ \)1%的时间戳的特征为\ \ (O_r > 0.9)无论职位类别如何。
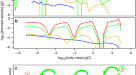
为了进一步研究阴影对鲢鱼集体行为的影响,我们基于鱼的空间关系创建了一个复杂的网络表示。详情见“材料与方法,我们首先获得给定时间内与鱼位置相关的Voronoi细分,并在Voronoi图中绘制共享边界的个体之间的联系(图2)。4A).个体之间的这种空间关系近似于传感器网络的属性,因此是鱼类相互作用的一个很好的代理40.接下来,我们在10分钟窗口内汇总所有连接的信息,以创建一个加权网络,其中鱼是节点,它们之间的加权连接表示一对鱼在时间间隔内保持邻居关系的时间分数,除以鱼的数量减1。最后,我们将这些网络分为前面使用的相同的三类:阴影下的白天时间,阴影外的白天时间和夜间位置。数字4B描述了这些类别的典型网络的可视化。在这些可视化图中,在Voronoi图中大部分时间内仍然是邻居的个体之间的联系由宽边和暗边表示,而薄边和浅灰色边表示成对的鱼是邻居的频率要低得多。

在白天,在遮荫结构下或在无遮荫结构下以及在夜间,鲢鱼的相互作用网络估计。(一个一组十只鱼的Voronoi镶嵌的例子。黑线描绘Voronoi细胞,而橙色圆圈表示鱼类在特定时间(14小时37分钟)的位置。交互网络是通过连接Voronoi图中共享边界的个体来创建的(橙色线表示本例中的所有链接)。(B)通过在10分钟间隔内聚合交互网络获得的加权网络示例。边权值表示Voronoi图中一对鱼在时间间隔内保持邻居关系的时间分数,时间间隔除以鱼的数量减1。每个节点之间的线越深越宽,这些鱼之间的联系就越强。的概率分布C)平均加权度k和(D)平均加权传递性C将数据分为三类:阴影下的白天时间(绿色方格)、阴影外的白天时间(粉色圆圈)和夜间位置(紫色十字)。
对图中的网络进行简单的可视化检查。4B表示白天在阴凉处或无阴凉处与夜间鱼类之间的相互作用不同。白天没有阴影的位置的网络在几个人之间有更强烈的联系,而其他网络显示出较少的这种联系(特别是在夜间)。为了系统地探讨这些差异,我们首先评估平均加权度k这些网络(见“材料与方法”)。加权度\ (\ kappa \)是连接到给定节点的边的权值之和,因此它表示与给定鱼相邻的所有鱼的时间分数之和除以鱼的总数减1。因此,这个数量是一条鱼在10分钟间隔内拥有的平均邻居数量(按时间分数加权并按鱼的数量归一化)的指标;例如,如果鱼保持星形结构,则中心鱼的值为\ (\ kappa \)大约等于1,而\ (\ kappa \)大约等于1除以鱼的数量减去周围所有鱼的数量。平均加权度k加权度的平均值是多少\ (\ kappa \)在所有网络节点上,因此它是鱼群中鱼之间互动数量的代理。
数字4C为平均加权度的概率分布k当把网络分成三类时。在白天,我们观察到与阴影下和阴影外位置相关的网络之间存在明显的区别——阴影下位置产生的网络的平均加权度低于阴影外位置。这一结果表明,在树荫下,鱼之间的相互作用更少,因为我们知道在树荫下极化很低(图2)。3.E),我们可以进一步断言,这种较低数量的相互作用部分解释为缺乏稳定的形成特征的群态。相反,白天离开阴凉处的鱼表现出的大量相互作用反映了更稳定和极化的结构,在这种结构中,鱼会跟踪它们邻居的方向。反过来,与夜间位置相关的平均加权度分布比前两种情况更加均匀,这表明夜间相互作用的数量更具随机性。
我们还计算了平均加权传递系数C41(参见“材料与方法”)。对于未加权的网络,传递性系数(也称为聚类系数)测量封闭三组的密度,从而表明一个节点的最近邻居被连接的趋势42.类似地,加权传递性量化封闭三组的密度,考虑到三角形图案的边权的几何平均值。因此,其中一条边具有非常低的强度的闭三元组对加权传递性的贡献很小,而所有边都具有高权重的闭三元组对加权传递性的贡献更大。我们可以把这个传递系数解释为鱼位置局部秩序的指标,这样稳定的局部邻域(即倾向于保持相同的第一邻域的运动)预计会产生更高的值C而不是不稳定的当地社区。
数字4D为平均加权传递系数的概率分布C当将网络分为三类时。我们注意到的分布C与夜间和白天在阴凉处或阴凉处的位置相关的网络有显著不同。夜间位置产生最小的传递性值,分布峰值在\ (C \大约0.5 \)而白天的位置创造了更高传递性值的网络。当比较白天在阴凉处和没有阴凉处的位置时,我们进一步观察到,没有阴凉处的位置产生更大的传递性值(分布峰值在\ (C \大约0.85 \))而不是阴凉处(分布高峰在\ (C \大约0.75 \)).因此,白天不在树荫下的位置具有强烈的封闭三元关系,这不仅表明鱼群的全球运动极化,而且在这种条件下,鱼类的局部邻居在运动过程中保持非常稳定。相反,尽管白天在阴影下和夜间运动的极化程度相似(图2)。3.E),我们的结果表明,在后一种情况下,闭合和强三和弦的形成要少得多。因此,尽管鱼在白天和晚上在树荫下经常保持成群的状态,但在树荫下的位置保持了一种中等的局部秩序,在这种秩序中,尽管鱼的运动方向不同,但它们仍然跟踪着它们邻居的位置。
讨论
我们对背阴环境对鲢鱼行为的影响进行了广泛的研究。与其他鱼类相似23,24,25,26,27在我们的实验中,我们首次证实了在白天荫凉有利于鲢鱼的栖息,但在我们的实验中,对荫凉结构的偏好程度存在显著差异。由于天气和/或水的清晰度导致的光照水平的变化可能在这些差异中发挥作用,因为鱼类可能在光照水平较高的情况下使用阴影或遮蔽物23,25.云量、沉积物或浮游植物的生产力可能在短期和长期时间尺度上影响水的清晰度。然而,尽管是粗略的,我们已经评估了池塘和试验之间的光照水平和阴影使用之间的关系,发现没有很强的相关性。此外,水温与阴凉处的使用并没有很好的关联。虽然旨在测试环境条件影响的研究处理方法是最好的,但我们认为光照强度和水温在我们的研究中发挥了次要作用。在光线方面,池塘内的浮游动物和浮游植物群落在试验中增加,导致水的清晰度降低。然而,这并没有导致在试验中使用阴影结构的减少趋势。另外,虽然我们的试验产生了一个大的数据集,但我们的发现是基于四个重复的池塘,这可能不足以在这些变量中得出明确的模式。
尽管如此,由于缺乏明显的环境因素来解释阴影选择的差异,我们可以假设个体差异和偏好可能在这个问题上发挥作用。尼罗罗非鱼(Oreochromis niloticus),虽然在分类上有分歧,但已经发现在选择不同颜色方面存在个体偏好差异43以及不同的衬底尺寸44.事实上,几项评估动物偏好的研究发现,在随后的测试中,它们的选择有所不同45,46,47,48,49.在个体性影响阴影选择的假设下,单个个体如何影响整个群体选择阴影结构的决定成为未来研究可能解决的一个迷人问题。另一种可能的解释是,在其他变化中,驯化可能会产生风险承受能力强的个体50.我们研究中使用的鱼是在现场繁殖和饲养的,可能抑制了自然本能,这反过来也可以解释阴影选择的变化,因为阴影偏好和捕食风险之间存在关联23,25,28,29,30..在这方面,未来的研究可以验证家养和野生个体群体之间的阴影选择和行为是否不同,甚至这些模式在它们的自然栖息地会发生怎样的变化。
除了发现鱼在白天比晚上更有可能在阴凉处,我们的研究还揭示了鲢鱼的行为根据鱼在白天或晚上是在阴凉处还是不在阴凉处而有很大的不同。鱼白天在阴凉处游得比在阴凉处游得慢得多,但在夜间它们游得最快。此外,速度时间序列在这三种情况下表现出不同程度的长期持久性。当鱼在树荫下时,长时间的持久性会下降,而在晚上会变得更强烈,这表明鱼的活动在晚上和不在树荫下时更直接。
我们还通过两种方法研究了这种鱼类的集体行为在白天和夜间的阴影下或阴影外的位置是如何变化的。在第一个中,我们依赖于两个阶参数来量化学校的极化和旋转程度。我们在实验中发现鲢鱼很少采取强烈的旋转状态,阴影或夜间不影响这种行为。这些强旋转状态的缺乏可能归因于我们研究中使用的个体数量。与Golden Shiner进行研究(Notemigonus crysoleucas), Tunstrøm等。39在2.1 m × 1.2 m的浅水池中,30条鱼的群体很少采用旋转的群体状态,但随着群体规模的增加,这些状态的频率也会增加。因此,未来对更多鲢鱼的研究可能有助于我们了解这些鱼是否表现出强烈的旋转状态,以及阴暗的环境是否在这些状态的出现中发挥作用。相反,鱼类在荫凉结构下呈现出无优先运动方向的群集状态,而在白天离开荫凉时则呈现出相互一致运动的强极化状态。
在第二种方法中,我们基于从Voronoi鱼位置细分中获得的空间关系为鲢鱼创建了交互网络,这种技术非常接近鱼的感觉网络40.我们发现,在白天和夜间,在阴影结构下或阴影结构外的位置,这些相互作用网络有显著不同。在树荫下,鱼之间的互动减少,白天离开树荫时,它们倾向于保持更多的稳定邻居;在夜间,相互作用的加权数量分布更均匀。我们进一步观察到,鱼类之间出现了强大而紧密的三元关系。白天无荫凉时强闭合三合群密度较大,荫凉时密度减小,夜间密度进一步减小。
综上所述,我们的研究结果表明,在荫蔽结构下,鲢鱼的速度降低,运动的持久性降低,群体极化降低,这与休息或潜伏运动状态一致。尽管如此,在这种情况下,这些鱼似乎保持了一定程度的局部秩序,正如它们相互作用网络中的中间传递性值所表明的那样。在白天和没有阴影的时候,鲢鱼移动迅速,持续,在群体状态下表现出强烈的极化和稳定的形成,标志着非常高的传递性值和大量的稳定邻居。这些结果表明鲢鱼在白天在池塘中活动时保持集体注意状态,可能是为了觅食35,36,37.最后,这些鱼在夜间达到它们的最高速度和长距离持久性,而群体极化类似于阴影下的情况。此外,与其他两种情况相比,夜间鱼类之间的相互作用要弱得多,因为相互作用网络具有更均匀的加权度分布和低传递性值的特征。因此,鱼似乎利用黑暗来安全地探索环境,在群体状态下,以小协调性为标志,这可能是由于视觉条件降低和被捕食的风险降低。我们相信这些发现可能会对管理这种入侵物种产生影响。例如,将这些知识与非结构性屏障的优先级和设计相结合,可以提高这些迁移威慑物的性能。最后,我们的研究结果表明,鱼在阴凉处比在室外保持更多的潜伏状态,为鱼提供这种在阴凉处或不在阴凉处的选择也可以改善动物福利51.
材料与方法
实验与数据提取
本研究中使用的实验和数据集包括在美国密苏里州哥伦比亚哥伦比亚环境研究中心美国地质调查局的四个土池中进行的七项试验。池塘长约40米,宽约25米,深度范围为1-2米,设置为重复;所有的努力都是为了控制池塘之间的变化,包括水流量。实验始于10条幼鲢鱼(\(345.2 \pm 17.5\)长度和长度\(377 \pm 64.7\)克重,均数±标准差),现场产卵饲养,放置在每个池塘中。我们使用了幼鱼,因为较大个体的饲养要复杂得多,也因为它们被认为是性不成熟的(控制了与不同性别相关的潜在混淆行为变量)。所有个体都装有声波发射器(20\ \(\倍)6.8 mm,重量1.1 g, 795-LD;Innovasea Systems Inc.,波士顿,马萨诸塞州;(原水声技术有限公司)要么通过手术植入体腔(20人),要么从外部固定在鱼身上(20人)。动物工作符合reach准则和所有适用的实验和研究道德标准,并由美国地质调查局哥伦比亚环境研究中心机构动物护理和使用委员会批准(IACUC编号:AEH-18-CERC-01)。声学遥测系统(M290;在每个池塘中使用Innovasea Systems Inc.)来获得平均每1.3 s的二维鱼类位置,小于0.2%的重新定位发生在间隔大于10 s的时间,平均空间精度为0.38 m。此外,使用数据记录器(UA-002-64;HOBO Pendant)部署在每个池塘的南端的水下。一个5米2浮动平台被放置在每个池塘的五个可能的位置之一,空置的位置与池塘的其余部分无法区分。图中用小写字母(从' a '到' e ')表示的虚线正方形。1A、B和S1表示每个池塘中遮阳结构的五个可能位置。遮阳结构分别位于试验1中1号、2号、3号和4号池塘的“a”、“b”、“c”和“d”位置。让鱼适应阴凉处24小时,然后开始48小时的试验(从0时00分开始,到第二天23时59分结束)。浮动平台在每次试验中依次移动到新的位置;例如,池塘2中遮阳结构的位置为:“c”\ \ rightarrow \ ()' d '\ \ rightarrow \ ()“e”\ \ rightarrow \ ()“一个”\ \ rightarrow \ ()“b”\ \ rightarrow \ ()“c”\ \ rightarrow \ ()“d”。在两次试验之间重复驯化期。这个平台在它下面创造了一个阴凉的环境,模仿可能在固体垂直或悬垂结构附近发现的水生栖息地。
通过检查每条鱼在1小时滑动窗口内的位置变异性(连续位置增量的标准偏差),我们在每次试验中过滤掉了排出的发射器的所有位置。位置变异性小于每条鱼整体变异性20%的轨迹被认为是潜在的发射机损失,并进行视觉检查。所有被确定为排出的发射器的轨迹都从我们的分析中完全删除。我们已经目视检查了所有轨迹,并过滤掉了与不良检测事件相关的时间序列,这些事件导致位置检测中存在非常大的(超过1小时)间隙。这些差距归因于个别标签信号的异常与发射机数据处理步骤中的限制性设置相吻合,从而导致标签传输的排除。最终的数据集包括来自个体的2400多万个位置,这些个体在整个个体试验中保留了他们的声学发射器(40个人中的18个人为所有7个试验贡献了数据),如表所示1.在第七次试验结束时,池塘里的水都排干了,40条鱼都活了出来。
速度时间序列
为了估计鱼的速度时间序列,我们首先将鱼的轨迹分割为两类,代表在阴影结构中的位置和离开阴影结构的位置。在这些类别中,我们然后选择具有超过50个连续观测的轨迹段,并使用连续位置之间的距离和时间计算速度。最后,将这些速度时间序列分为三组:遮阳下的白天时间、无遮阳下的白天时间和夜间位置。
去趋势波动分析
我们估计了赫斯特指数h从速度时间序列分段v(t)通过去趋势波动分析(DFA)52,53.DFA由以下步骤组成。我们从定义集成概要文件系列开始\ (Y (t) = \总和_ {i = 1} ^ t [v (i) - \ langle v (t) \捕杀]\),在那里\(v(t) \rangle\)为时间序列段的平均速度。接下来,我们进行抽样Y(t)\ (m_n = m / n \)大小不重叠的分区n,在那里米是时间序列的长度。对于每个分区,我们调整一个线性模型并将其减去Y(t),定义尺度上的去趋势剖面n作为\(Y_n(t) = Y(t) - p_j(t)\,在那里\ \ (p_j (t))控件中调整后的线性函数jth分区。最后,计算均方根波动函数\ (F (n) = \总和_ {j = 1} ^ {m_n} \ langle最大(t) ^ 2 \纠正_j / m_n \),在那里\(\ rangle Y_n(t)²\rangle _j\)的均方值是\ \(最大(t))在jth分区。对于自相似时间序列,F(n)显示对的幂律依赖n,\ (F (n) \ sim n ^ h \),在那里h为Hurst指数。我们估计h通过计算幂律关系线性化后的斜率(\(\log F(n) \sim h \log n\)),用普通最小二乘法。的值\ \ (h > 0.5)表示长期持续行为,而\ (h \大约0.5 \)表示不相关或短范围相关的时间序列。我们还确定了从速度时间序列的洗牌版本得到的赫斯特指数在0.5左右,证实了长期相关性的存在。
命令参数
为了计算顺序参数,我们首先使用最近邻方法插值每条鱼的轨迹,并以4-s分辨率重新采样这些时间序列,以便在每个试验和池塘中同步所有鱼的轨迹。利用这些同步轨迹,极化阶参数定义为38,39
在哪里\ (\ mathbf{你}_i \)单位方向向量是我在给定时间内进行特定试验和池塘的鱼N跟踪鱼。的价值\ (O_p \)被限制在区间[0,1]和\ (O_p \大约1 \)表示鱼强对齐的配置,而\ (O_p \约0 \)指示平均没有对齐的情况。在其回合中,旋转顺序参数由38,39
在哪里r \ (\ mathbf {} _i \)单位矢量是从学校的质心指向物体的位置吗我th鱼。这个量表示鱼角动量的归一化平均值,它被限制为区间[0,1]。的下界\ (O_r \)表示没有旋转的情况,而上界表示强旋转配置。图的结果。3.只考虑了5条或更多鱼的试验;然而,当考虑整个数据集时,我们的结论保持不变。
交互网络
我们使用前一节中定义的相同的同步轨迹来创建交互网络。对于一个有五条或更多鱼的试验和池塘,我们在特定的时间选择所有的位置t并创建Voronoi图。该图将鱼的位置划分为多个凸多边形,每个多边形都包含一条鱼的位置,并且多边形内的每个点都更接近这条鱼而不是其他鱼(见图中的黑线)。4以A为例)。使用Voronoi图t,我们创建一个图表\(g_t = (\nu,\varepsilon)\)在顶点\ \(ν\)对应于鱼和边的集合\ \ varepsilon \ ()连接Voronoi镶嵌中相邻的所有个体对(见图中的橙色线)。4以A为例)。最后,我们结合这些图表\ (g_t \)使用长度不重叠的时间间隔\δt (\ \)创建一个加权网络\(G_\tau = (V,E,W)\)在哪里\ \(τ\)表示时间间隔中的中心点,顶点V代表鱼,边的集合E在时间间隔内连接所有曾经是邻居的个体对,并且W是边权值的集合,表示一对个体在时间间隔内保持邻居关系的时间分数,时间间隔除以鱼的数量减1。图的结果。3.为\ \(δt = 10 \)最小值;然而,在考虑其他时间间隔时,敏感性分析显示了相似的结果(见图。S7).此外,当超过10%的鱼类位置在时间间隔内被定位在阴影结构下时,我们考虑一个网络来表示阴影下类别(灵敏度分析显示,考虑不同阈值时,结果相似,如图所示。S8).
网络的措施
平均加权度
加权度\ (\ kappa \)一个顶点的权值是它所有入射边的权值之和42.平均加权度k为网络中所有网络顶点加权度的平均值。
平均加权传递率
传递性度量图中顶点聚集在一起的程度。对于简单和无向图,传递性(或全局聚类系数)被定义为闭三联体的数量与三联体总数(开和闭)之间的比率。42.该度量量化了特定节点的最近邻居本身成为邻居的趋势。对加权网络的传递性有几种概括54,我们使用了Onnela et al.的定义41用三角形强度的归一化和(其中强度指的是边权的几何平均值)替换未加权定义中的闭合三元组的数量,在Python包NetworkX中实现55.
数据可用性
支持此手稿的数据可在[Faulkner, j.d., Acre, m.r. & Brey, m.k., 2022, Silver Carp (Hypophthalmichthys molitrix)有架空结构的土池塘的位置:美国地质调查局数据发布,https://doi.org/10.5066/P9XURDHS]。
参考文献
Camazine, S。et al。生物系统中的自组织(普林斯顿大学出版社,2001)。
桑普特,d.j.。动物集体行为(普林斯顿大学出版社,2010)。
维塞克,T. &扎菲里斯,A.集体运动。理论物理。代表。517, 71 - 140。https://doi.org/10.1016/j.physrep.2012.03.004(2012)。
Vicsek, T., Czirók, A., Ben-Jacob, E., Cohen, I. & Shochet, O.自驱动粒子系统中的新类型相变。理论物理。启。75, 1226年。https://doi.org/10.1103/PhysRevLett.75.1226(1995)。
托纳,J.和Tu . Y.在二维动态XY模型的长程顺序:鸟类如何一起飞行。理论物理。启。75, 4326年。https://doi.org/10.1103/PhysRevLett.75.4326(1995)。
Bialek, W。et al。自然鸟群的统计力学。Proc。国家的。学会科学。109, 4786 - 4791。https://doi.org/10.1073/pnas.1118633109(2012)。
Gautrais, J。et al。破译移动动物群体的相互作用。公共科学图书馆第一版。医学杂志。8, e1002678。https://doi.org/10.1371/journal.pcbi.1002678(2012)。
马特奥,D.,宽,Y. K.和Bouffanais, R.群体相关性对集体反应的影响。科学。代表。7, 10388年。https://doi.org/10.1038/s41598-017-09830-w(2017)。
查尔斯沃斯,h。j。特纳,本质动机集体运动。Proc。国家的。学会科学。116, 15362 - 15367。https://doi.org/10.1073/pnas.1822069116(2019)。
Heupel, M. Semmens, J. M. & Hobday, A.水生动物的自动声学跟踪:监听站阵列的规模、设计和部署。3月Freshw。Res。57, 1-13。https://doi.org/10.1071/MF0509(2006)。
斯特劳,A. D.,布兰森,K.,诺伊曼,T. R.和迪金森,M. H.多摄像机实时三维跟踪多种飞行动物。J. R. Soc接口8, 395 - 409。https://doi.org/10.1098/rsif.2010.0230(2011)。
Pérez-Escudero, A., Vicente-Page, J., Hinz, R. C., Arganda, S. & de Polavieja, G. idTracker:通过自动识别无标记动物来跟踪群体中的个体。Nat方法。11, 743 - 748。https://doi.org/10.1038/nmeth.2994(2014)。
Walter, T. & Couzin, i.d. TRex,一种具有无标记识别的快速多动物跟踪系统,以及姿态和视野的二维估计。eLife10, e64000。https://doi.org/10.7554/eLife.64000(2021)。
Tuia D。et al。机器学习对野生动物保护的展望。Commun Nat。13, 792年。https://doi.org/10.1038/s41467-022-27980-y(2022)。
Jetz, W。et al。用动物传感器进行生物地球观测。生态发展趋势。另一个星球。37, 293 - 298。https://doi.org/10.1016/j.tree.2021.11.011(2022)。
江,L。et al。识别动物群体中有影响力的邻居。公共科学图书馆第一版。医学杂志。13, e1005822。https://doi.org/10.1371/journal.pcbi.1005822(2017)。
赫伯特-里德,j.e.。et al。捕食如何塑造鱼群的社会互动规则。Proc. R. Soc。B杂志。科学。284, 20171126。https://doi.org/10.1098/rspb.2017.1126(2017)。
帕帕多普卢,M.,希尔登布兰特,H.,桑基,D. W.,葡萄牙,S. J. & Hemelrijk, C. K.鸽群集体逃跑的自组织。公共科学图书馆第一版。医学杂志。18, e1009772。https://doi.org/10.1371/journal.pcbi.1009772(2022)。
Nuzhin, E. E., Panov, M. E. & Brilliantov, N. V.动物为什么旋转以及它们如何分组。科学。代表。11, 1-15(2021)。
野外,B。et al。社交网络可以预测蜜蜂的生死。Commun Nat。12, 1 - 12。https://doi.org/10.1038/s41467-021-21212-5(2021)。
谢文华,李志强,李志强。外部线索对鱼群个体和集体行为的影响。科学。睡觉。3., e1603201。https://doi.org/10.1126/sciadv.1603201(2017)。
克鲁克,D. &罗伯逊,A.河流鱼类和木质碎片之间的关系:对低地河流的影响。3月Freshw。Res。50, 941 - 953。https://doi.org/10.1071/MF99072(1999)。
麦卡特,a . L,林奇,W. E.和约翰逊,D. L.光,捕食者,和经验如何影响蓝鳃鱼使用荫凉和学校。环绕。医学杂志。鱼49, 79 - 87。https://doi.org/10.1023/A:1007353314602(1997)。
Cocheret De La Morinière, E, Nagelkerken, I., Van Der Meij, H. & Van Der Velde, G.是什么吸引了幼年珊瑚礁鱼到红树林:栖息地的复杂性还是荫蔽?3月的杂志。144, 139 - 145。https://doi.org/10.1007/s00227-003-1167-8(2004)。
McMahon, t.e. & Hartman, g.f.覆盖复杂性和流速对幼银鲑冬季栖息地使用的影响(雄鱼kisutch).可以。j .鱼。Aquat。科学。46, 1551 - 1557。https://doi.org/10.1139/f89-197(1989)。
琼斯,n.a.,斯宾塞,R,琼斯,F. A. &斯宾塞-琼斯,H. C. Shade作为充实:测试两种模型鱼类对庇护所的偏好。J.鱼类生物学95, 1161 - 1165。https://doi.org/10.1111/jfb.14129(2019)。
谢勒,E. & McNicol .湖白鱼偏好回避反应(Coregonus clupeaformis)到光与铜、铅和锌的竞争梯度。水Res。32, 924 - 929。https://doi.org/10.1016/s0043 - 1354 (97) 00299 - 6(1998)。
Fernández-Juricic, E. & Tran, E.警惕和觅食行为的变化与光强度及其对食物摄入和捕食者检测的影响。动画。Behav。74, 1381 - 1390。https://doi.org/10.1016/j.anbehav.2007.01.005(2007)。
Mandelik, Y., Jones, M. & Dayan, T.结构复杂的栖息地和感官适应调节了沙漠啮齿动物对增加捕食风险的间接线索的行为反应。另一个星球。生态。Res。5, 501-515(2003)。
卡尔,J. M.和利马,S. L.越冬鸟类避免温暖的阳光:在阳光下捕食和觅食的代价。环境科学174, 713 - 721。https://doi.org/10.1007/s00442-013-2804-7(2014)。
Sabal, m.c., Workman, m.l., Merz, J. E. & Palkovacs, E. P. Shade影响幼年奇努克鲑鱼在迁徙走廊的反捕食者行为的量级和策略。环境科学197, 89 - 100。https://doi.org/10.1007/s00442-021-05008-4(2021)。
Kolar C。et al。亚洲鲤属(双鱼,鲤科)-生物概要和环境风险评估(给美国鱼类和野生动物管理局的报告,2005)。
果馅饼,a.k.et al。在密西西比河高水头大坝,船闸操作影响了入侵鱼类和本地鱼类的上游通道。医学杂志。入侵23, 771 - 794。https://doi.org/10.1007/s10530-020-02401-7(2021)。
Ghosal, R., Xiong, P. X. & Sorensen, P. W.入侵的鳙鱼和银鲤形成不同大小的鱼群,很容易混合。《公共科学图书馆•综合》11, e0157174。https://doi.org/10.1371/journal.pone.0157174(2016).
李志刚,张志刚,张志刚。鲢鱼的摄食行为Hypophthalmichthys molitrixVal.及其对以色列Kinneret湖食物网的影响。Hydrobiologia12053 - 61。https://doi.org/10.1007/bf00034590(1985)。
浮游食性鱼类:它们的进化,摄食行为,选择性和影响。Hydrobiologia146, 97 - 167。https://doi.org/10.1007/BF00008764(1987)。
Vörös, L., Oldal, I., Présing, M. & V-Balogh, K.鲢鱼对浮游藻类的大小选择过滤和分类群特异性消化(Hypophthalmichthys molitrixVal)。在《浅湖》95年, 223 - 228,https://doi.org/10.1007/978-94-011-5648-6_24(施普林格,1997)。
Kolpas, A., Moehlis, J. & Kevrekidis, i.g.随机诱导的集体运动状态之间切换的粗粒度分析。Proc。国家的。学会科学。104, 5931 - 5935。https://doi.org/10.1073/pnas.0608270104(2007)。
Tunstrøm, K。et al。鱼群的集体状态、多稳定性和过渡行为。公共科学图书馆第一版。医学杂志。9, e1002915。https://doi.org/10.1371/journal.pcbi.1002915(2013)。
Strandburg-Peshkin,。et al。动物群体的视感觉网络与有效信息传递。咕咕叫。医学杂志。23, R709-R711。https://doi.org/10.1016/j.cub.2013.07.059(2013)。
Onnela, j。,Saramäki, J., Kertész, J. & Kaski, K. Intensity and coherence of motifs in weighted complex networks.理论物理。启E71, 065103年。https://doi.org/10.1103/PhysRevE.71.065103(2005).
纽曼,M。网络:简介(奥福德大学出版社,2010)。
Maia, C. M. & Volpato, G. L.一种基于历史的方法来估计动物偏好。科学。代表。6, 28328年。https://doi.org/10.1038/srep28328(2016).
马亚,C. M. & Volpato, G. L.个性对尼罗罗非鱼幼鱼的基质大小偏好很重要。j:。动画。韦尔夫。科学。21, 316 - 324。https://doi.org/10.1080/10888705.2017.1423229(2018)。
高丁,J.-G.J. & Dugatkin, L. A.雌性交配偏好的可变性和可重复性。动画。Behav。49, 1427 - 1433。https://doi.org/10.1016/0003 - 3472 (95) 90063 - 2(1995)。
Johnsson, J. I, Carlsson, M. & Sundström, L. F.生境偏好增加褐鳟的领土防御(斑鳟属trutta).Behav。生态。Sociobiol。48, 373 - 377。https://doi.org/10.1007/s002650000244(2000)。
希尔兹,S. J.,加纳,J. P. & Mench, J. A.肉鸡除尘:对四种不同基质偏好的比较。达成。动画。Behav。科学。87, 69 - 82。https://doi.org/10.1016/j.applanim.2004.01.003(2004)。
Gómez-Laplaza, L. M.社会地位对淡水鱼浅滩偏好的影响(Pterophyllum天使鱼).行为142, 827-844(2005)。
Browne, W. J., Caplen, G., Edgar, J., Wilson, L. R. & Nicol, C. J.鸡环境偏好测试中选择测量之间的一致性、传递性和相互关系。Behav。的过程。83, 72 - 78。https://doi.org/10.1016/j.beproc.2009.10.004(2010)。
Saraiva, J. L., Castanheira, M. F., Arechavala-López, P., Volstorf, J. & Studer, B. H.养殖鱼类的驯化和福利。在动物驯化,第六章(特列切亚编,F.)https://doi.org/10.5772/intechopen.77251(IntechOpen, 2018)。
道金斯通过动物的眼睛:行为告诉我们什么。达成。动画。Behav。科学。One hundred., 4到10。https://doi.org/10.1016/j.applanim.2006.04.010(2006)。
彭,C.-K。et al。DNA核苷酸的镶嵌组织。理论物理。启E49, 1685年。https://doi.org/10.1103/PhysRevE.49.1685(1994)。
Kantelhardt, J. W., koscielney -Bunde, E., Rego, H. H. A., Havlin, S. & Bunde . A.用去趋势波动分析检测长程相关性。理论物理。一个械甲怪。达成。295, 441 - 454。https://doi.org/10.1016/s0378 - 4371 (01) 00144 - 3(2001)。
Saramäki, J., Kivelä, M., Onnela, J.- p。,Kaski, K. & Kertesz, J. Generalizations of the clustering coefficient to weighted complex networks.理论物理。启E75, 027105年。https://doi.org/10.1103/PhysRevE.75.027105(2007)。
哈格伯格,A. A.,舒尔特,D. A. &斯沃特,P. J.探索网络结构,动态和功能使用网络x。在第七届Python科学大会论文集瓦罗克,G。et al。) 11-15(2008)。
确认
作者感谢Andy Mueller, Cody Slaugh, Mark Roth, Steve Shier和Taylor Tidwell在鱼类标记和数据收集方面的帮助。作者还想感谢Matt Sholtis, Nick Swyers和Ty Hatton处理遥测数据。这项研究是在哥伦比亚环境研究中心的美国地质调查局机构动物护理和使用委员会(IACUC编号:AEH-18-CERC-01)的主持下完成的。资金来源是美国地质调查局生态系统任务区域入侵物种项目。对贸易、公司或产品名称的任何使用仅用于描述目的,并不意味着得到美国政府的认可。H.V.R.和L.R.C.感谢Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES)和国家Desenvolvimento协会Científico e Tecnológico (CNPq-Grant 303533/ 201 -8)的支持。本文中不存在利益冲突。
作者信息
作者及隶属关系
贡献
H.V.R, M.R.A . .,J.D.F., L.R.C., K.M.L., J.J.W., M.K.B., C.M.W., and R.D.C. designed research, performed research, analyzed data, and wrote the paper.
相应的作者
道德声明
相互竞争的利益
作者声明没有利益竞争。
额外的信息
出版商的注意
施普林格自然对出版的地图和机构从属关系中的管辖权主张保持中立。
补充信息
权利和权限
开放获取本文遵循知识共享署名4.0国际许可协议,允许以任何媒介或格式使用、分享、改编、分发和复制,只要您对原作者和来源给予适当的署名,提供知识共享许可协议的链接,并注明是否有更改。本文中的图像或其他第三方材料包含在文章的创作共用许可协议中,除非在材料的信用额度中另有说明。如果材料未包含在文章的创作共用许可协议中,并且您的预期使用不被法定法规所允许或超出了允许的使用范围,您将需要直接获得版权所有者的许可。如欲查看本牌照的副本,请浏览http://creativecommons.org/licenses/by/4.0/.
关于本文

引用本文
里贝罗,h.v.,阿克,m.r.,福克纳,J.D.et al。背阴环境对鱼类集体行为的影响。Sci代表12, 17873(2022)。https://doi.org/10.1038/s41598-022-22515-3
收到了:
接受:
发表:
DOI:https://doi.org/10.1038/s41598-022-22515-3
